方向一:复杂系统建模、控制与优化
(1)随机系统控制
1)高度非线性时滞依赖随机系统方面:针对时滞依赖泛函随机微分方程,给出高度非线性随机时滞系统稳定性依赖时滞大小的判别准则,并研究了随机系统的H∞稳定、LP稳定、几乎必然稳定等稳定性问题 (Nonlinear Analysis-Hybrid Systems, 2019)。针对高度非线性多时滞混杂随机时滞微分方程,通过对系数的分解,给出了时滞依赖的判别准则(Journal of Applied Analysis and Computation, 2019)。另一方面,对于中立型时滞依赖随机系统,给出了稳定性时滞上界的判别准则,并探讨了H∞稳定、LP稳定、几乎必然稳定等稳定性问题(Systems & Control Letters, 2018)。
2)高度非线性随机时滞系统稳定性方面:针对高度非线性中立型比例时滞随机微分方程,分别采用构造Lyapunov泛函及M-矩阵方法研究了方程解的指数稳定性问题(Asian Journal of Control, 2020)。针对高度非线性多时滞中立型混杂随机时滞微分方程,利用包含更多函数类的Lyapunov函数给出了方程解的指数稳定性(Science China-Information Sciences, 2019)。在G-Brown 运动驱动下,研究了高度非线性随机系统的解的存在唯一性及稳定性(Applied Mathematics-A Journal of Chinese Universities, 2019)。
3)高度非线性随机系统反馈控制方面:针对高度非线性混杂中立型随机微分方程,利用Lyapunov泛函法研究了随机系统的时滞反馈控制问题,并给出了渐近稳定的判别准则(Systems & Control Letters, 2020)。对于高度非线性混杂随机微分方程,结合M-矩阵及Lyapunov泛函研究了系统的离散观测反馈控制(IEEE Transactions on Automatic Control)。另一方面,对于高度非线性时滞混杂随机微分方程,讨论了离散观测反馈控制问题,并给出了指数稳定的判别准则(IET Control Theory & Applications,2020)。
4)随机微分方程数值解方面:针对带有Markov切换的时变时滞的随机微分方程在人口模型中的应用,采用分裂θ法给出了方程的数值解(Applied Numerical Mathematics, 2019)。对于带有Poisson跳的随机微分方程,采用截断的EM方法给出了数值解及稳定性的判据(Journal of Computational and Applied Mathematics, 2019)。在G-SDDE的全局 Lipschitz 条件下,证明了当且仅当步长足够小时,G布朗驱动的时滞随机微分方程在均方上是指数稳定的,利用Euler-Maruyama 方法研究G布朗驱动的时滞随机微分方程指数稳定性(Applied Mathematics Letters, 2019)。对金融中具有Poisson跳跃的广义Ait-Sahalia利率模型,研究了该模型解的正性、有界性和路径渐近估计等分析性质。并证明了Euler-Maruyama数值解在概率上收敛于模型的真实解(Physica A, 2019)。利用截断的Euler-Maruyama方法研究了高度非线性时滞随机微分方程的数值解(Communications on Pure & Applied Analysis, 2020)。
(2)复杂系统协同分析与控制
1)复杂系统的状态估计与滤波分析:基于网络通信协议研究了几类非线性随机网络的状态估计与滤波问题,进而基于采样的思想,正在开展符合采样数据系统特点的传感器网络分布式滤波方法的研究,该研究将能有效的提高实际工业系统运行的安全性和可靠性。
2)社会合作网络的协同分析:在H-K模型中引入竞争机制。我们发现引入了竞争机制之后的H-K模型仍然具有聚类特征。特别的,我们发现,在一定的条件下,所有个体将被分成两个极端,即极化或双一致(polarization or Bipartite Consensus)。此外,考虑到个体的执拗特性以及竞争和社会压力,我们提出了一个模型来探索社会的压力是如何左右个体的意见走向的。在我们的模型中,我们假设社会网络是存在支撑树的,在这种情况下,我们发现,如果社会压力有一定限度的逐渐增加,则个体将形成多个聚类。如果社会压力无限制的逐渐增加,社会个体最多形成两个团体,也即是说,团体能够获得一致或双一致。
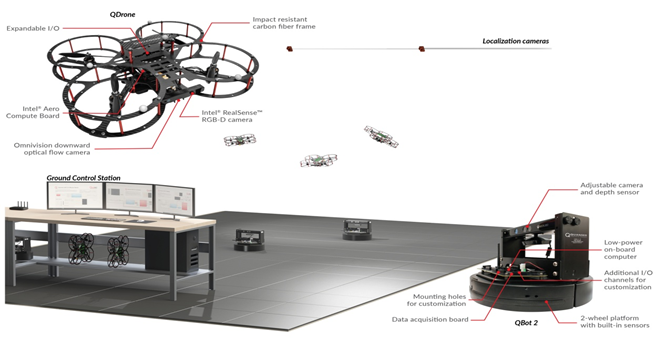
方向二:移动机器人感知与智能控制
(1)平台一:移动机器人、无人机控制平台,系统由实时控制软件和多智能体任务开发体系、地面控制站、无人飞行器、无人地面机器人、照相机定位系统等几部分组成,可完成无人工具的动态建模和控制研究、运动规划、避障控制、机器视觉、机器学习、多信息融合、地空协同控制、无人工具自主控制等、视觉SLAM、传感器网络、群控策略等实验任务。
(2)平台二:基于视觉移动机械臂抓取作业机器人平台,利用MATLAB/Simulink和ROS联合开发,集成了安装Linux和ROS的控制系统,自主导航的移动底盘、多轴机械臂、执行末端、开源视觉系统和远程控制;支持智能语音控制、智能识别、GPS、5G远程图传、神经网络、深度学习等应用扩展;可完成2D/3D机器抓取等视觉实验、激光雷达的定位导航实验,如三环控制实验、电机PID调节实验、激光导航规划算法实验、ROS通讯实验、串口驱动移植实验、CAN驱动移植实验、视觉标定实验、机器视觉定位实验等。

(3)平台三:无人机/无人艇协同控制平台,由无人机系统、无人艇系统、岸基协同控制系统组成,可进行无人机系统的应用、无人艇系统的应用、协同控制系统相关理论与技术、无人机的起降与跟踪控制等研究。

方向三:微网电能质量控制与能源互联网优化调度
(1)平台一:光伏微电网系统,由光伏发电单元、逆变器、混合储能单元、充电桩、微电网控制器、综合保护装置、监控与能量管理系统等组成,研发了基于自抗扰控制的PCS充放电控制、考虑时序配合的PCS离/并网运行平滑切换、基于分层协同的PCS多模式运行构架、基于硬件软件解耦的分层保护、基于自律分散分层解耦的监控系统设计、基于虚拟同步发电机控制的微电网电能质量治理等技术。

(2)平台二:能源互联网平台,在光伏微电网系统基础上增加了风力发电单元、冷热电联供系统、分散式储能装置、能源网关、能源路由器等模块,研发了多能互补协同优化控制、分散式储能控制、广域联动保护策略、虚拟化云端管控等技术,建有能源互联网智慧服务云平台(http://220.178.171.213:1004/ioe/)。
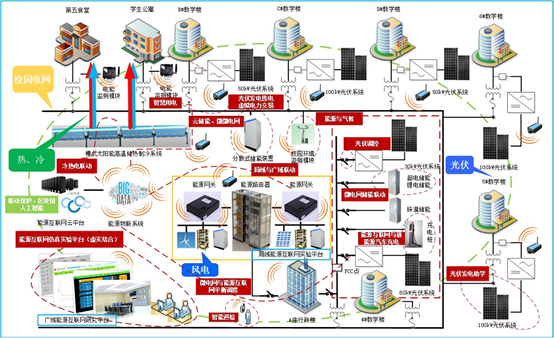
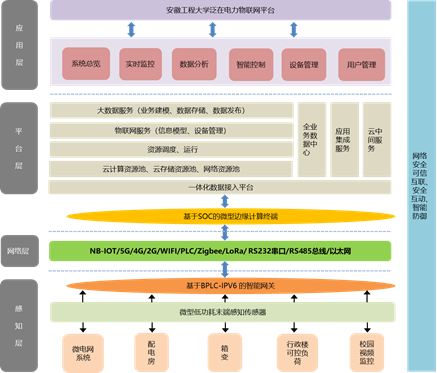
(3)平台三:泛在电力物联网平台,在能源互联网平台基础上为解决智慧能源服务最后一公里问题增加了智能边缘计算终端、边缘计算网关、5G切片、主动安全防御系统,研发了边缘终端设备多元异构数据融合、云边端自适应协同管控、时空多维协同主动防御、故障异常数据挖掘等技术。
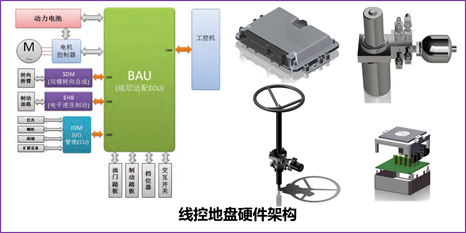
方向四:新能源汽车驱动与智能自主控制
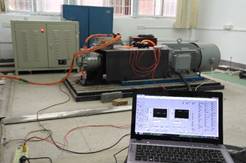
(1)平台一:新能源汽车电驱动系统测试平台,新能源汽车电驱动系统测试平台主要由电池模拟电源、功率分析仪、交流电力测功机、电机控制器、工控机、上位机、被测永磁同步电机、以及扭矩/转速传感器等构成,系统采用CAN总线集成。测试参数包括:测功机转速、扭矩、功率,电动机输入电压、电流,控制器输出电压、电流有效值,控制器输出有功功率,控制器输出频率、功率因数、效率等。平台上可进行电驱动系统速度特性试验、负荷特性试验、控制器输出电特性试验。



(2)平台二:智能驾驶平台,主要由车辆智能传感器包括激光雷达、毫米波雷达、视觉传感器、惯性导航,智能线控底盘包括线控系统、设备总线,能够实现“人工驾驶”、“自动驾驶”多种驾驶模式和控制方式,车辆软件算法系统包括Ubuntu操作系统、ROS系统架构的软件平台、SLAM算法、单点扫描算法等智能驾驶算法,能够实现道路环境感知与信息融合、交通标记识别、路径规划和车辆智能行驶。